Ryan_Smith
Menu
Skip to content
Home
Science & Tech
Robotics
Big Data / AI / IoT
Computer Vision
Radiotherapy
Photonics
Tinkering
Pubs/Patents
Monthly Archives:
January 2018
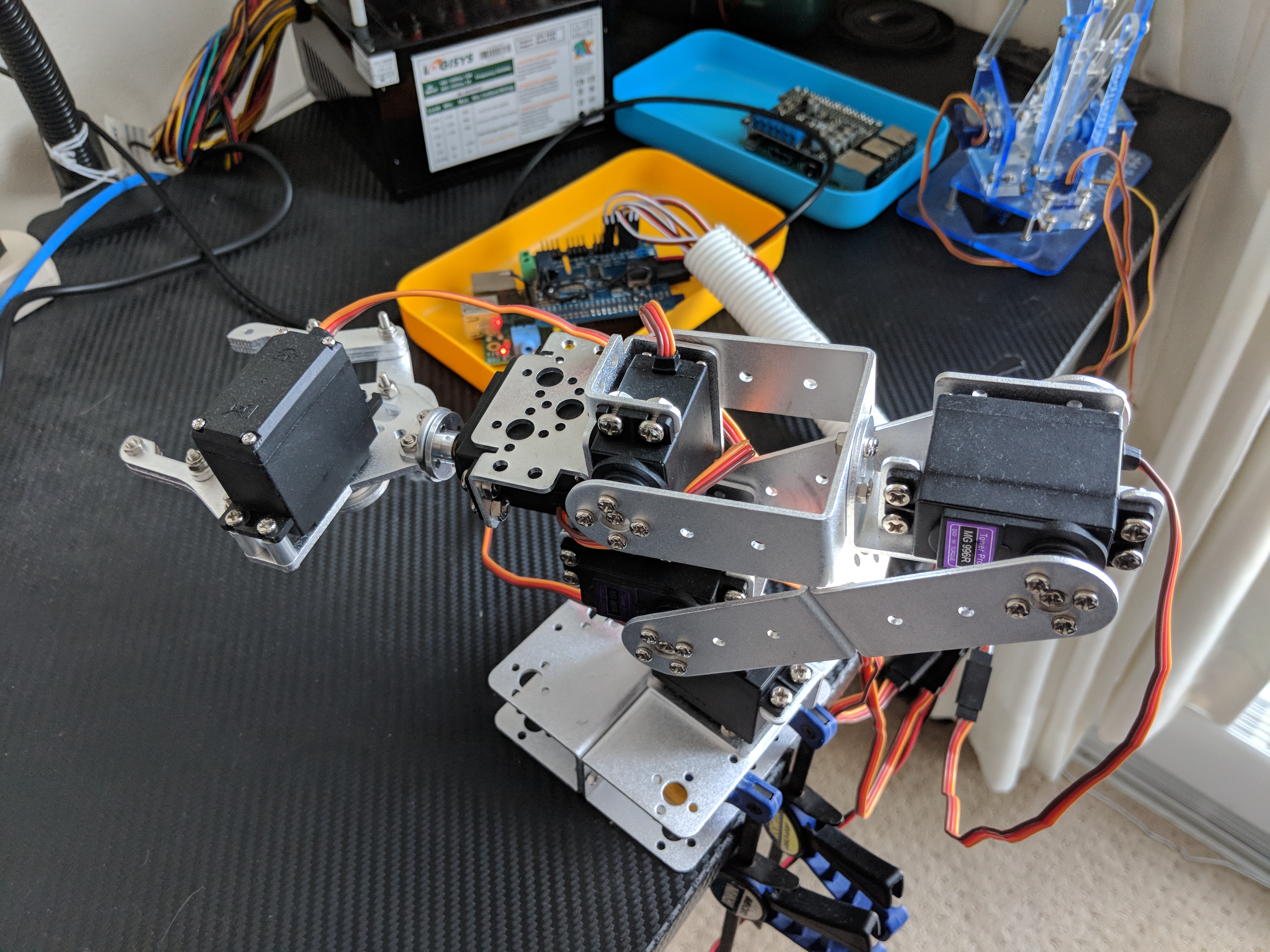
Robotic arm: A raspberry pi driven 6-axis ROT2U implementation
Posted on
January 1, 2018
by
admin